
以下程序全部放在125US中断里面
以下是发送端程序
#include "USER_PROGRAM.H"
#define TX_IO _pa1
typedef struct {
unsigned char b0 : 1;
unsigned char b1 : 1;
unsigned char b2 : 1;
unsigned char b3 : 1;
unsigned char b4 : 1;
unsigned char b5 : 1;
unsigned char b6 : 1;
unsigned char b7 : 1;
} _bits;
_bits var_0;
#define Read_Once var_0.b0
#define Send_One_Bit_Over var_0.b1
#define Start_Send var_0.b2
#define FLAG_10MS var_0.b3
#define KEY_PRESS var_0.b4
#define KEY_PRESS1 var_0.b5
#define KEY_PRESS2 var_0.b6
/*******************发送通讯变量*****************************/
unsigned char Tx_Step,Tx_Dat_Step;
unsigned char Start_Count;
//bit Read_Once,Send_One_Bit_Over;
unsigned char Tx_Low_Count,Tx_High_Count,Send_Count;
//bit Start_Send;
unsigned char Tx_Data1;
/*******************发送通讯变量*****************************/
//bit FLAG_10MS;
unsigned char KEY_DATA_TEMP;
//bit KEY_PRESS,KEY_PRESS1,KEY_PRESS2;
void IO_INIT()
{
TX_IO=1;
_pac=0x00;
}
void CLR_BIT()
{
Read_Once =0;
Send_One_Bit_Over =0;
Start_Send =0;
FLAG_10MS =0;
KEY_PRESS =0;
KEY_PRESS1 =0;
KEY_PRESS2 =0;
}
void TIMER_INIT()
{
_tmr=(256-125); //(256-125);
_tmrc=0b10000100;//Ftmr=Fsys/16=1 MHz
_tf=0;
_te=1;
_ton=1;
_emi=1;
}
void DEAL_SCAN_KEY()
{
GET_KEY_BITMAP();
if(DATA_BUF[0]!=0)
{
if(!KEY_PRESS1)
{
KEY_PRESS1=1;
KEY_PRESS=1;
KEY_PRESS2=1;
}
} else
{
KEY_PRESS1=0;
}
if(DATA_BUF[0]&0x01)
{
KEY_DATA_TEMP|=0x01;
} else
{
KEY_DATA_TEMP&=0xFE;
}
if(DATA_BUF[0]&0x02)
{
KEY_DATA_TEMP|=0x02;
} else
{
KEY_DATA_TEMP&=0xFD;
}
if(DATA_BUF[0]&0x04)
{
KEY_DATA_TEMP|=0x04;
} else
{
KEY_DATA_TEMP&=0xFB;
}
if(DATA_BUF[0]&0x08)
{
KEY_DATA_TEMP|=0x08;
} else
{
KEY_DATA_TEMP&=0xF7;
}
if(DATA_BUF[0]&0x10)
{
KEY_DATA_TEMP|=0x10;
} else
{
KEY_DATA_TEMP&=0xEF;
}
if(DATA_BUF[0]&0x20)
{
KEY_DATA_TEMP|=0x20;
} else
{
KEY_DATA_TEMP&=0xDF;
}
}
void TIMER_UP_DATA()
{
static unsigned char _500MS_COUNT;
if(KEY_PRESS)
{
KEY_PRESS=0;
_500MS_COUNT=50;
}
_500MS_COUNT++;
if(_500MS_COUNT>=51)
{
if(!Start_Send) {
_500MS_COUNT=0;
Tx_Data1=KEY_DATA_TEMP;
Start_Send=1;
}
}
}
void USER_PROGRAM_INITIAL()
{
CLR_BIT();
IO_INIT();
TIMER_INIT();
}
void USER_PROGRAM()
{
if(FLAG_10MS)
{
FLAG_10MS=0;
DEAL_SCAN_KEY();
TIMER_UP_DATA();
}
}
#pragma vector TIMER_ISR @ 0x0C
void TIMER_ISR(void)
{
static unsigned char _1MS_COUNT;
_tf=0;
_1MS_COUNT++;
if(_1MS_COUNT>=8)
{
_1MS_COUNT=0;
FLAG_10MS=1;
}
if (Start_Send) //开始发送
{
switch (Tx_Step)
{
case 0:
///////////////////////////蜂鸣器数据处理//////////////////////////////
TX_IO=0; //拉低IO口
Start_Count++;
if (Start_Count>=32) //72*125us 9ms
{
Start_Count=0;
Tx_Step=1;
}
break;
case 1:
TX_IO=1; //拉高IO口
Start_Count++;
if (Start_Count>=36) //36*125us 4.5ms
{
Start_Count=0;
Tx_Step=2;
}
break;
case 2: //开始发送数据
if (Tx_Data1&0x80) //先发高位 //如果为1
{
if (Send_One_Bit_Over==0)
{
if (Tx_Low_Count<5) //先拉低0.56ms
{
Tx_Low_Count++;
TX_IO=0;
}
if (Tx_Low_Count==5)
{
Tx_High_Count++;
TX_IO=1;
if (Tx_High_Count>=12)
{
Tx_Low_Count=0;
Tx_High_Count=0;
Send_One_Bit_Over=1;
}
}
}
} else //是0
{
if (Send_One_Bit_Over==0)
{
if (Tx_Low_Count<5) //先拉低0.56ms
{
Tx_Low_Count++;
TX_IO=0;
}
if (Tx_Low_Count==5)
{
Tx_High_Count++;
TX_IO=1;
if (Tx_High_Count>3)
{
Tx_Low_Count=0;
Tx_High_Count=0;
Send_One_Bit_Over=1;
}
}
}
}
if (Send_One_Bit_Over)
{
Send_One_Bit_Over=0;
Tx_Data1<<=1;
Send_Count++;
if (Send_Count>8) //发送完成了
{
Send_Count=0; //清标志位
Read_Once=0;
Start_Send=0;
Tx_Step=0;
TX_IO=1;
}
}
break;
default:
break;
}
}
}以下是接收端程序
//////////接收变量
#define Rx_Read_Once var_0.b0
#define Rx_Read_Now var_0.b1
#define Rx_Change var_0.b2
#define Rx_Dat_Bit var_0.b3
#define Rx_Dat_Bit1 var_0.b4
#define Rx_Flag var_0.b5
unsigned char Rx_Step,Rx_Start_Count,Rx_Start_Count1,RX_Dat_Low_Count,RX_Dat_High_Count,RX_Count;
unsigned char RX_Dat1,RX_Dat;
//////////接收变量
/****************************用扫描的方式代替中断*********************************************/
if (Rx_Read_Once==0) //读一次现在的IO口状态
{
Rx_Read_Once=1;
Rx_Read_Now=GPIO_GetBit(GPIOC, PIN4);
}
if (Rx_Read_Now!=GPIO_GetBit(GPIOC, PIN4)) //IO口电平发生了变化
{
Rx_Read_Once=0;
Rx_Change=1;
}
switch (Rx_Step)
{
case 0:
if (GPIO_GetBit(GPIOC, PIN4)==0) {
Rx_Step=1;
}
Rx_Start_Count=0;
break;
case 1:
if (GPIO_GetBit(GPIOC, PIN4)==0)
{
Rx_Start_Count++;
}
if (GPIO_GetBit(GPIOC, PIN4)==1)
{
if (Rx_Start_Count>=28&&Rx_Start_Count<=34) //9ms 9000/125=72
{
Rx_Start_Count=0;
Rx_Step=2;
} else
{
Rx_Start_Count=0;
Rx_Step=0;
}
}
break;
case 2:
if (GPIO_GetBit(GPIOC, PIN4)==1)
{
Rx_Start_Count1++;
}
if (GPIO_GetBit(GPIOC, PIN4)==0)
{
if (Rx_Start_Count1>=30&&Rx_Start_Count1<=40) //4.5ms 4500/125=36
{
Rx_Step=3;
//UART0_SendByte(Rx_Start_Count1);
Rx_Start_Count1=0;
Rx_Change=0;
Rx_Read_Once=0;
} else
{
Rx_Start_Count1=0;
Rx_Step=0;
}
}
break;
case 3:
if (Rx_Dat_Bit==0) //数一下低电平的时间
{
RX_Dat_Low_Count++;
if (Rx_Change==1) //IO口由低变成高了
{
Rx_Change=0;
Rx_Read_Once=0;
Rx_Dat_Bit=1;
}
}
if (Rx_Dat_Bit==1) //数完低电平 数高电平
{
RX_Dat_High_Count++;
if (Rx_Change==1) //IO口由高变成低
{
Rx_Change=0;
Rx_Read_Once=0;
Rx_Dat_Bit=0;
Rx_Dat_Bit1=1;
}
}
if (Rx_Dat_Bit1)
{
Rx_Dat_Bit1=0;
RX_Dat1<<=1;
if (RX_Dat_Low_Count>=3&&RX_Dat_High_Count>=11) //收到拉低0.5MS 拉高1.5
{
RX_Dat=(RX_Dat1 |= 0x01); //收到1
}
if (RX_Dat_Low_Count>=3&&RX_Dat_High_Count<=6&&RX_Dat_High_Count>=3) //收到拉低0.5MS 拉高0.5MS
{
RX_Dat=RX_Dat1; //收到0
//0
}
RX_Dat_Low_Count=0;
RX_Dat_High_Count=0;
RX_Count++;
if (RX_Count>=8)
{
RX_Count=0;
RX_Dat=RX_Dat1;
Rx_Step=0;
Rx_Flag=1;
RX_Dat1=0;
}
}
break;
default:
break;
}
/*************************4P通讯接收END***************************************/
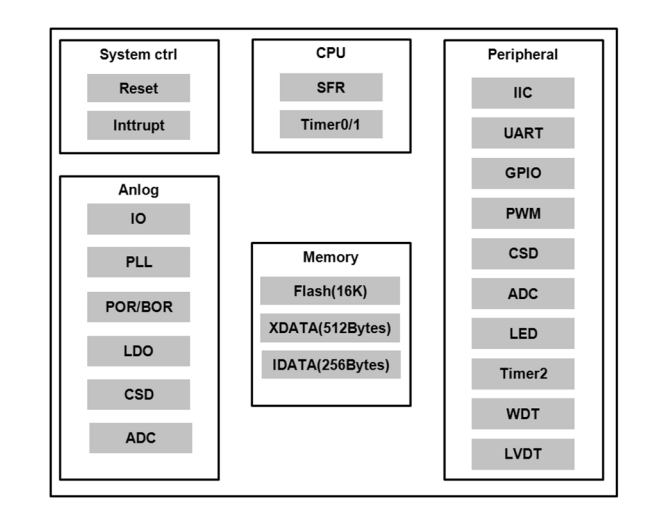 BF7612AMXX-MCU-Datasheet
BF7612AMXX-MCU-Datasheet STM32单片机GBK编码转UTF8编码
STM32单片机GBK编码转UTF8编码 合泰单片机驱动步进电机程序
合泰单片机驱动步进电机程序 一款红外感应自动开盖的垃圾桶源码
一款红外感应自动开盖的垃圾桶源码 合泰BS86D12C PWM初始化函数
合泰BS86D12C PWM初始化函数 基于STM8的TIM定时器操作
基于STM8的TIM定时器操作 GB2312字库找地址程序
GB2312字库找地址程序 十速单片机触摸包生成软件
十速单片机触摸包生成软件